





Do You Need Help? Here Us : Teléfono : +86 595 22486398
Do You Need Help? Here Us : Teléfono : +86 595 22486398
¡choque! La nueva excavadora eléctrica añade dos nuevas funciones
August 30, 2024
Las excavadoras son una de las máquinas más importantes en la industria minera y de la construcción. Hoy en día, los combustibles fósiles proporcionan la mayor parte de la energía que necesitan las excavadoras. Dado que esta forma de energía es perjudicial para el medio ambiente, es especialmente importante el desarrollo de las funciones de las excavadoras eléctricas. En particular, las excavadoras hidráulicas consumen mucha energía incluso cuando no están en movimiento. Además, las mangueras y válvulas de los sistemas de excavadoras hidráulicas desperdician energía, lo que llevó a los investigadores a aplicar actuadores lineales eléctricos. Estos actuadores suelen ser accionados por un motor eléctrico y una serie de husillos de bolas (o husillos de avance), que deben soportar grandes tensiones axiales y al mismo tiempo disipar energía cuando no están en movimiento.
Una extensa investigación explora el uso de actuadores eléctricos en excavadoras. En el diseño e implementación de sistemas de control y accionamiento eléctrico para excavadoras de minería, se propone un nuevo sistema mecatrónico para excavadoras de minería que utiliza motores de CC y sensores de potencia de transistores y tiene como objetivo reducir el consumo de energía entre un 20% y un 30%. Además, al reducir la carga dinámica sobre los actuadores de la excavadora, los investigadores intentaron reducir la carga sobre los actuadores eléctricos de la excavadora incorporando un dispositivo de amortiguación elástico adicional en el esquema de movimiento de la excavadora.
La baja capacidad de retroceso de los actuadores eléctricos nos impulsó a desarrollar excavadoras eléctricas con esta característica. Sin embargo, los actuadores eléctricos suelen producir menos fuerza que los actuadores hidráulicos. Por lo tanto, las excavadoras que utilizan estos actuadores deben diseñarse de manera diferente para que los actuadores soporten cargas más ligeras con las mismas cargas externas en la punta del cucharón. Este diseño puede mejorar la capacidad de carga de la excavadora eléctrica. Al mismo tiempo, reducir la carga sobre el actuador puede reducir su consumo de energía.
1. Diseño y fabricación de excavadoras eléctricas.
Este estudio propone un diseño novedoso de una excavadora eléctrica que utiliza un actuador de tornillo lineal, aprovechando su menor capacidad de marcha atrás para ahorrar energía durante los períodos de inactividad y con una capacidad de carga menor que un actuador hidráulico. Específicamente, la disposición paralela de los actuadores lineales en el nuevo diseño tiene como objetivo reducir la distribución de carga entre ellos (Figura 1).

Figura 1. Excavadora fabricada y banco de pruebas.
Los primeros tres actuadores instalados en la excavadora son actuadores lineales eléctricos (Figura 2) para movimientos de pluma, pluma y cucharón, mientras que el cuarto actuador es un motor de CC giratorio con engranajes para controlar los movimientos de giro. El motor de CC giratorio en un actuador lineal eléctrico está conectado al tornillo de avance a través de una serie de poleas y correas. El motor también está conectado a un potenciómetro giratorio, que proporciona información sobre la longitud del actuador. Además, los actuadores lineales de esta excavadora están conectados a la red como fuente de energía.
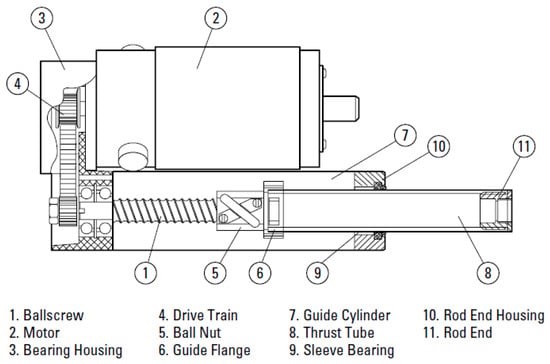
Figura 2. Componentes de un actuador eléctrico lineal
Los actuadores lineales seleccionados tienen una capacidad de carga dinámica de 2000 N y una velocidad de movimiento de 20 mm/s. Con la ayuda de dos enormes resortes tensores se puede elevar el brazo del brazo (Fig. 3). La fuerza máxima de estos resortes es de 70 kgf. la excavadora’La estructura está fabricada con chapas de aluminio 2D cortadas con láser y acero inoxidable. la excavadora’La pluma y la pluma están hechas de aluminio y ensambladas con pernos M12.
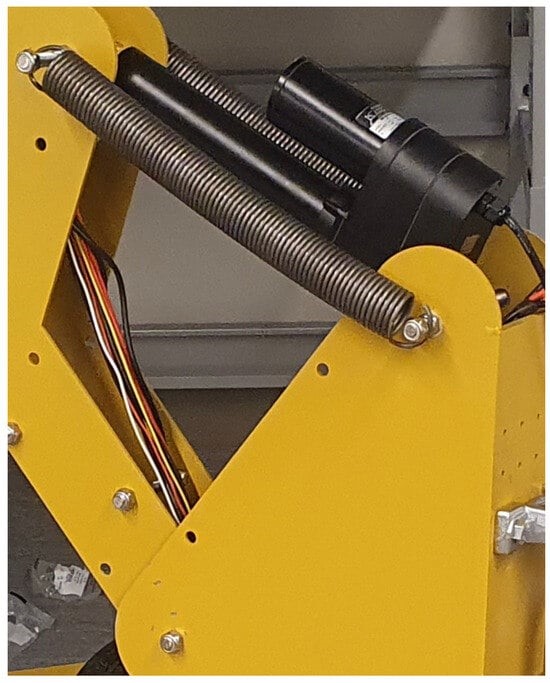
Figura 3. Dos enormes resortes ayudan al actuador del brazo a levantar la mano del robot.
Se sueldan cuatro tubos de acero cortados junto con las placas de acero de abajo para formar el marco inferior de la excavadora (Figura 4). La estructura dispone de cuatro ruedas inactivas para facilitar su movimiento. Luego, el manipulador de la excavadora (Figura 5) se monta en el bastidor inferior utilizando dos cojinetes resistentes.

Figura 4. Subestructura de excavadora.
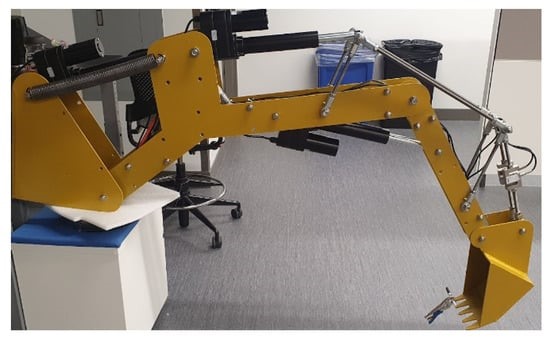
Figura 5. La parte manipuladora de la excavadora.
Para las pruebas en interiores, la excavadora se colocó a una altura de 85 cm y luego se condujo para retirar un montón de arena del contenedor principal y transferirla al contenedor lateral. El contenedor principal cuenta con un panel acrílico transparente que permite comparar el camino real y la superficie del suelo excavado cada vez que excava. Una cámara de profundidad, montada a cierta distancia del lado transparente del contenedor principal y conectada al PC, monitorea el perfil de arena en el contenedor. Utilice el software MATLAB R2021a para posprocesar los datos del sensor de la cámara. El primer paso en el posprocesamiento es capturar y recortar los datos, luego usar la biblioteca de detección de bordes en MATLAB para detectar los contornos de la arena en el contenedor que se ven como formas del suelo. En el paso final, seleccione el borde con la altura más baja como borde del suelo. La forma de la superficie de la arena se puede detectar usando este método, como se muestra en la Figura 6. A veces, cuando la arena se adhiere a una lámina acrílica transparente, es necesario recortar los bordes a mano.
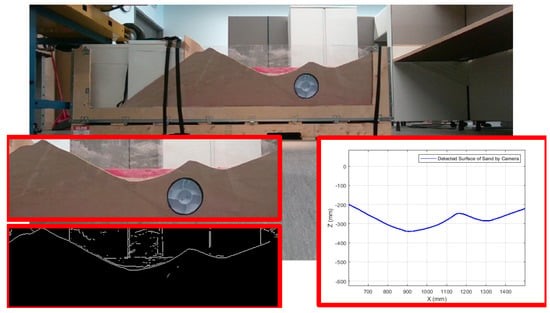
Figura 6. Utilice una cámara RGB y el software MATLAB R2021a para detectar la forma del suelo
2. Métodos de control de seguimiento y generación de rutas.
2.1. Generación de ruta
Además de utilizar actuadores paralelos para ahorrar más energía al reducir la carga del actuador, este estudio también considera la generación de trayectoria óptima para reducir el consumo de energía de las excavadoras autónomas. Para ello, la cuchara excavadora se considera un robot móvil que puede moverse en dos dimensiones y girar alrededor de un único eje. Estos tres grados de libertad (DOF) están controlados por actuadores lineales de pluma, brazo y cucharón.
Los obstáculos pueden ser predeterminados por el usuario o detectados mediante cualquier método de detección en tiempo real. Hay varios métodos disponibles para detectar la presencia y ubicación de objetos subterráneos. Entre ellos, el radar de penetración terrestre (GPR) y la tomografía de resistividad eléctrica (ERT) han ganado amplia aceptación. Sin embargo, estas técnicas son costosas y requieren mucho tiempo para implementarlas y operarlas. Otro estudio utilizó sensores magnéticos rentables fijados al cucharón de una excavadora para detectar y localizar tuberías metálicas y cables activos basándose en campos magnéticos. Como un robot móvil, el cucharón de la excavadora se mueve a lo largo de un camino designado evitando obstáculos. Pero para crear caminos adecuados para reducir el consumo de energía, la conservación de energía se incorpora a otros elementos.
2.2 Generación de rutas basada en PSO
La optimización del enjambre de partículas (PSO) es una técnica computacional inspirada en el comportamiento colectivo de animales como aves y peces. Resuelve problemas de optimización ajustando iterativamente la posición y la velocidad de las partículas en el espacio de búsqueda. PSO tiene como objetivo encontrar soluciones óptimas equilibrando la exploración y la explotación.
Este estudio utiliza el algoritmo PSO para generar caminos óptimos destinados a minimizar el consumo de energía durante la excavación y al mismo tiempo evitar obstáculos subterráneos. Los objetivos principales son reducir el consumo de energía, reducir la desviación de la forma del terreno de excavación de los contornos requeridos y aumentar la distancia a los objetos subterráneos.
Los resultados de la simulación de MATLAB muestran que el proceso de optimización basado en PSO de ahorro de energía (Figura 7) puede reducir el consumo de energía en un 18,5% (Figura 8) en comparación con el mismo proceso sin ahorro de energía al intentar evitar obstáculos subterráneos y lograr un camino más cercano. forma del terreno deseada.
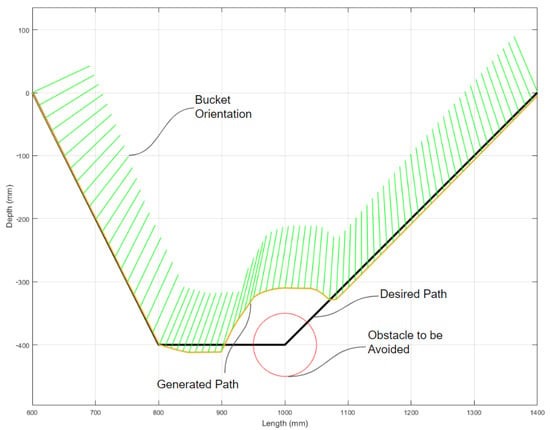
Figura 7. Simulación de generación de camino considerando el ahorro de energía.
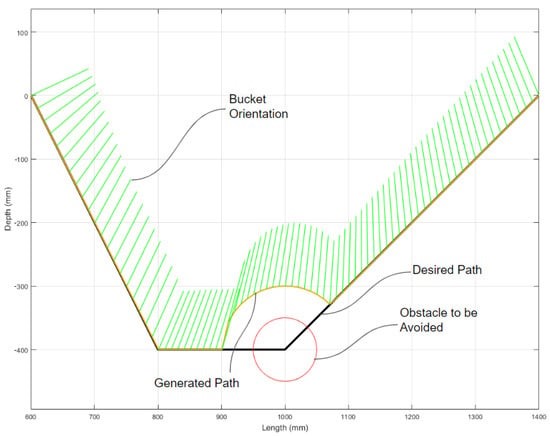
Figura 8. Simulación de generación de caminos sin considerar el ahorro de energía.
2.3 Generación de rutas basada en PFM
En el algoritmo PFM, el entorno se representa como un campo potencial y el robot intenta alcanzar el objetivo con la mínima energía potencial. Por lo tanto, en cada iteración, el robot se mueve a posiciones adyacentes con la energía potencial más pequeña y, en última instancia, encuentra el mejor camino hacia la meta atravesando estas posiciones.
En la planificación de rutas basada en PFM, el robot intenta alcanzar el objetivo que lo arrastra. Los experimentos demostraron todo lo contrario: los objetos de los que el robot intentaba alejarse lo empujaban. La magnitud del vector de empuje para los objetos anteriores puede variar según el tamaño del objeto. Finalmente, el robot elige su dirección sumando estos dos vectores (el vector de fuerza causado por el punto objetivo y el objeto) y elige su velocidad en función de la magnitud del vector sumado.
Para lograr un movimiento energéticamente eficiente, construimos un objeto artificial que tira del robot en una dirección que consume menos energía. En este estudio, este objeto artificial se denomina objeto E. Sin embargo, este objeto E debe colocarse en un área donde mover el robot hacia él no aumente la distancia entre el robot y el punto objetivo (Figura 9). De varias ubicaciones alrededor del robot, se seleccionará como objeto E la ubicación que requiera la menor energía para llegar.
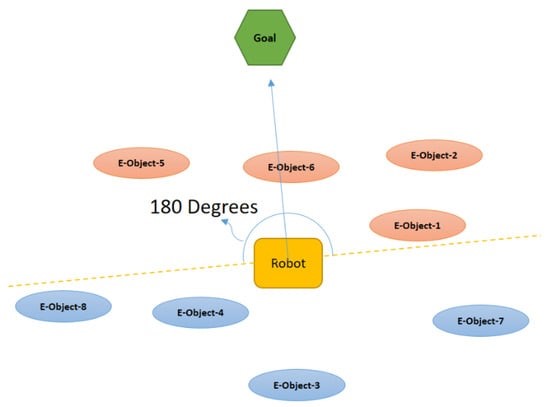
Figura 9. Puntos candidatos para crear E-Objects que reduzcan el consumo de energía
La Figura 9 ilustra cómo seleccionar objetos E que no aumenten la distancia entre el robot y el punto objetivo. Para alcanzar estos objetos E (representados por óvalos naranjas en la Figura 9), el robot no necesita alejarse mucho del punto objetivo. En la Figura 9 y la Figura 10, supongamos que el objeto E 2 consume la menor energía entre los candidatos naranja.
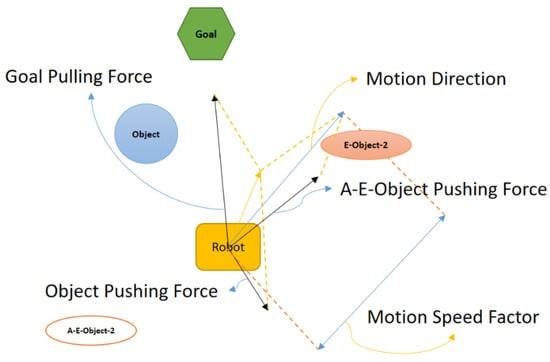
Figura 10. PFM con funciones de ahorro de energía
Para adherirse a la idea central de PFM que los obstáculos empujan al robot, se generó un objeto de energía artificial (AE-Objeto-2) en el otro lado del robot a la misma distancia (Fig. 10). Luego, el algoritmo PFM determinará la dirección y magnitud de la velocidad del robot, teniendo en cuenta los obstáculos de energía reales y artificiales, así como los puntos objetivo.
Las GFP son generalmente menos adaptables a las condiciones dinámicas que las OSP. Si bien las PSO pueden adaptarse a las condiciones cambiantes mediante las capacidades de exploración y explotación de enjambres de partículas, las PFM suelen requerir modelos estáticos para navegar de forma eficaz.
2.4 Control de seguimiento de ruta
Seguir el camino es tan importante como generarlo. Esto se debe a que la trayectoria generada debe rastrearse con precisión para lograr el movimiento deseado, consumiendo la menor cantidad de energía y minimizando la desviación entre la trayectoria seguida y la trayectoria creada.
Este estudio propone un nuevo diseño para la fabricación de una excavadora eléctrica autónoma que utiliza dos actuadores paralelos para distribuir la carga y aliviar la tensión en cada actuador. Las excavadoras eléctricas están diseñadas para ejercer más fuerza sobre el suelo consumiendo menos energía. El método de generación de trayectoria propuesto que emplea algoritmos PSO y PFM se probó utilizando una excavadora fabricada. Para esta prueba, se examinaron y compararon cinco escenarios diferentes según el tipo de generador de trayectoria, el tipo de controlador y el estado del modo de ahorro de energía.
Como trabajo futuro, existen varios enfoques posibles que podrían aplicarse para abordar el mismo tema. Por ejemplo, se puede utilizar un histograma de campo vectorial (VFH) para determinar posibles direcciones de navegación, evitando obstáculos y dirigiéndose hacia una meta basándose en un histograma polar del entorno creado. Como se mencionó en la introducción, ACO (Optimización de colonias de hormigas) también puede ser un candidato valioso. Además, el algoritmo desarrollado sólo se probó en excavaciones de arena en interiores. Esta limitación surge de los diseños actuales de excavadoras, que carecen de maniobrabilidad e impermeabilidad. Por lo tanto, se deben incorporar ruedas motrices y cubiertas impermeables al diseño de la excavadora para su uso futuro. Esta consideración permitirá realizar experimentos en ambientes al aire libre utilizando una variedad de materiales como limo, arcilla y grava. Además, este estudio utilizó una cámara colocada lejos de la placa transparente del arenero para monitorear el contorno del suelo, pero esto no es práctico en un ambiente al aire libre. Por lo tanto, se necesita un sensor adicional, como un lidar, para solucionar este problema y medir con precisión la forma del suelo.
Fuente: Departamento de Ingeniería Automotriz y Mecatrónica, Instituto de Tecnología de Ontario, Oshawa.

Continúe leyendo, manténgase informado, suscríbase y le invitamos a que nos cuente lo que piensa.
Add: Pudang Village, Xiamei Town, Nan'An City, Quanzhou, Fujian, China




Quanzhou Huamao Machinery Equipment Co.,Ltd Reservados todos los derechos
.  RED SOPORTADA
Mapa del sitio
| Blog
| Xml | política de privacidad
RED SOPORTADA
Mapa del sitio
| Blog
| Xml | política de privacidad


